Basic Parts Tutorial #10: Sawtooth, Simple Binary II (rebuild)
zardOz2 - Custom level - Nov 21, 2013 from Android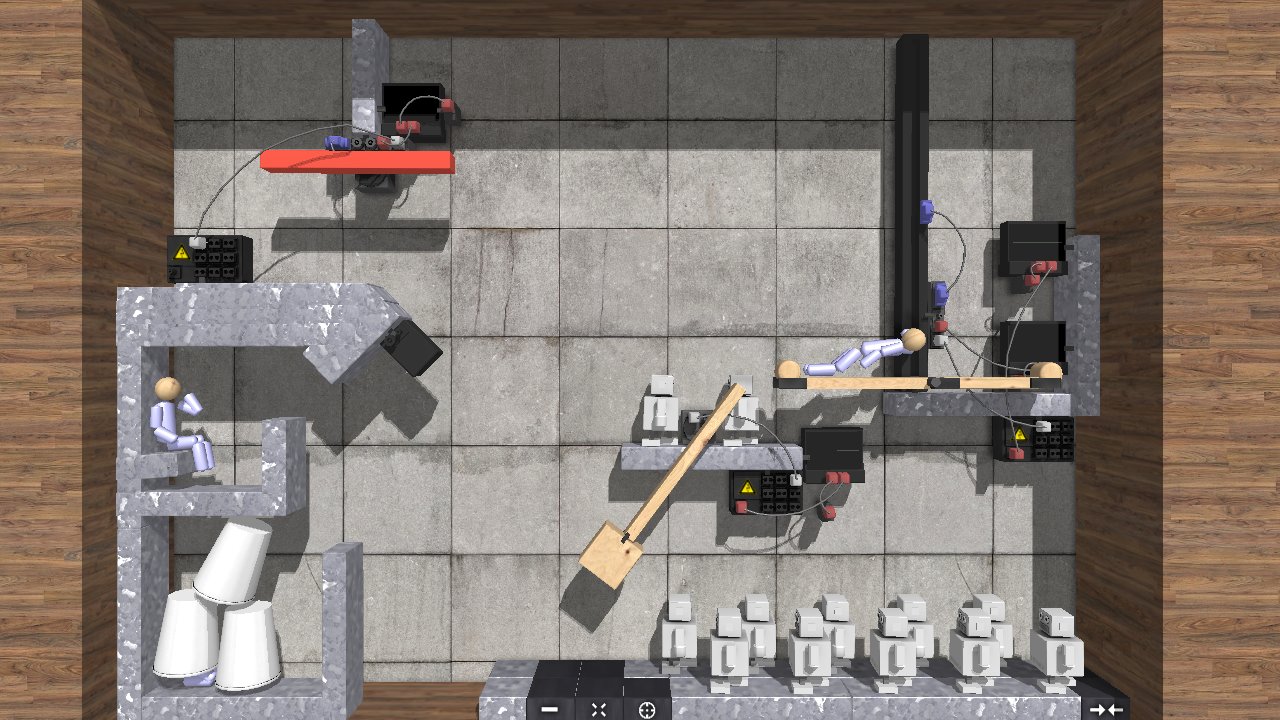
zardOz's Principia Tutorials #10
Need help? The example shows the basic function of the Sawtooth signal generator with more on CT servos.
With the help of their Sawtooth Motor the Robots can now make a move on the Dummy's Paper Cup warehouse.
(Continued from #9)
The Sawtooth produces a signal that ramps up to max (1.0) then suddenly drops to min (0.0) and begins again. This signal matches the signal needed to rotate one full circle which can be seen in the example at the top. On the right the long ffrequency Sawtooth is used as a toggler for the binary "reverse" input. When above 0.5 the motor kicks into reverse.
On the forum it was asked, why a signal of 0.5 or greater is equal to TRUE in some cases, the answer is quite important. Many of the components require or output a signal of either 1.0 (on/true) or 0.0 (off/false). These objects need to be able to work with and communicate with other objects which produce a signal between 0 and 1, in these cases a number of 0.5 or more is "rounded up" to 1 (true) and below 0.5 is rounded down to 0 (false).
Open the level in Sandbox to explore.
Downloads: 751 - Level ID: 829